弦振動による手術ロボット屈曲鉗子の力センシング
手術ロボット屈曲鉗子の力センシングは未だ未完成の技術です.細長い形状で屈曲する先端に加わる力を計測することは簡単ではありません.屈曲鉗子先端の関節を駆動するためのワイヤに注目し,左図のようにワイヤを加振しワイヤの弦振動による周波数から張力を計測し,先端に加わる力を求める方法を開発しています.細い鉗子のパイプにそのための装置を実装するためには工夫が必要です.右図はそれを組み込んだ2自由度屈曲鉗子です(観察のため鉗子のパイプを一部切断しています).
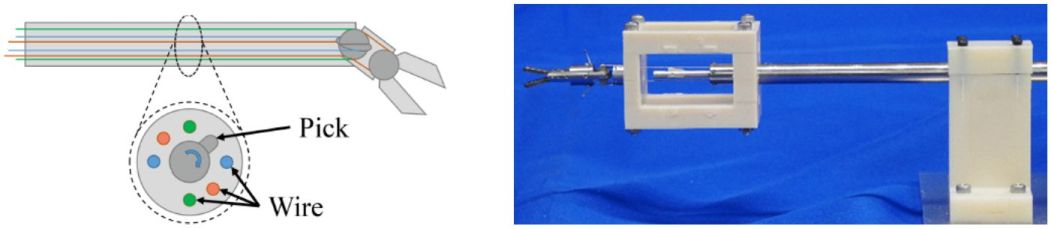
Fig. 1 弦振動による力センサの原理と2自由度屈曲鉗子への実装
研究紹介Top