パラレルメカニズム移動ロボット
移動ロボットの上体部をパラレルメカニズムとすると,さまざまな新しい機能が生まれます.
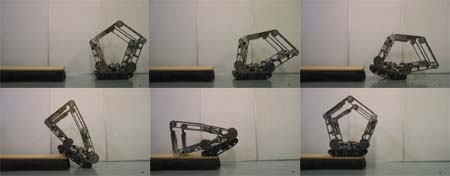
そのシンプルな例として,閉4リンク構造,閉5リンク構造のパラレルメカニズムを上体部に持つクローラ移動ロボットを開発しました.
その利点は,単に移動ができるだけではなく,
・上回りの重心を移動させることにより,段差の乗り越えが容易になる.
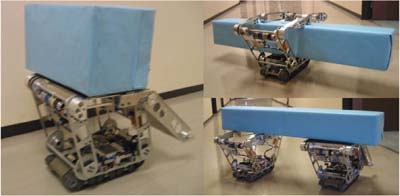
・さまざまな形態で物体を搬送できる.
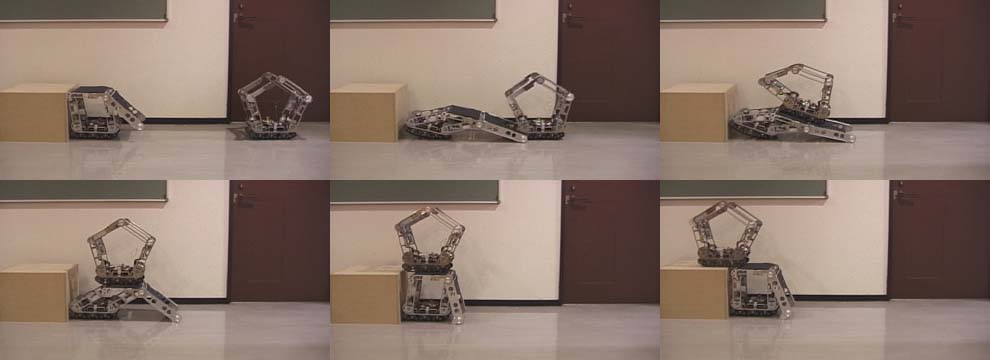
・閉4リンク構造のロボットは他の移動ロボット(写真では閉5リンク構造のロボット)を持ち上げることができる.
これにより持ち上げられたロボットは高所に登ることができる.
等です.
これらのロボットは構造が簡単のため,1台の製作は容易です.よって多数台製作することも容易です.
多数台が組み合わされば,さらに複雑な3次元構造が構成できると期待できます.
<動画>展示会でのパラレル移動ロボット段差昇降デモンストレーション(20.8MB)
研究紹介Top