多重チューブ推進機構(高山研究室)
伸縮性のある複数のチューブを束ねて,それぞれのチューブに周期的に圧力をかけて駆動すると,様々な運動が行なえます.
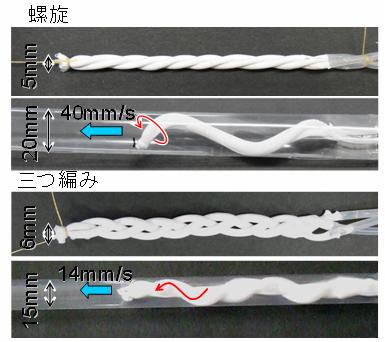
チューブを螺旋状に束ねて駆動すると胴体全体が螺旋形状になって捻転運動を行なう螺旋捻転運動となります.
螺旋捻転運動を管内で行うと螺旋状に転がって推進することができます.
螺旋捻転運動は柔軟な胴体のため屈曲部を容易に通過でき,無限回転部位を必要としないため気密性が高く,
タイヤによる移動装置やミミズの蠕動運動と比べて管の内壁に対してスリップを起こさないため安全で,
螺旋状になって管の内壁に張り付くため,流路を塞がないという利点を持ちます.
またチューブを三つ編みにして駆動する方式でも蛇のような屈曲動作による推進ができます.
管内検査ロボットや軟性内視鏡の推進装置等への応用を目指して開発をしています.
<動画>空気圧式螺旋捻転移動装置(4.8MB)
<動画>空気圧式三つ編み屈曲移動装置(7.8MB)
研究紹介Top