脚ロボットによる物体の把持・操作
従来の4脚ロボットの研究では,歩行が研究の中心でした.
脚ロボットが物体を把持・操作することができればその有用性は高まります.
そこで当研究室では,独自の4脚ロボットQuadlatorを開発しました.このロボットの特徴は以下の通りです.
・様々な姿勢に遷移可能である.そのため,例えば歩行中倒れても起き上がり復帰することができる.
・脚を腕として活用できる.とくに膝立ち姿勢では2本の脚を腕として使うことができる.
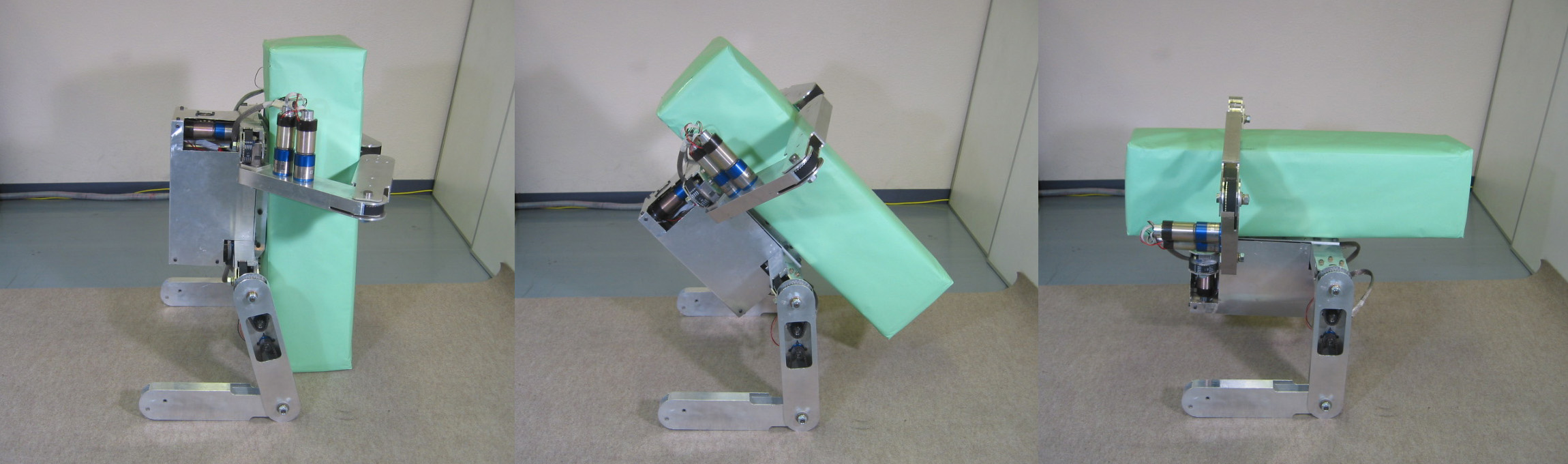

Quadlatorの関節数は1脚につき3,合計12です. 4脚ロボットとしては典型的な関節数であり,決して多くはありません.
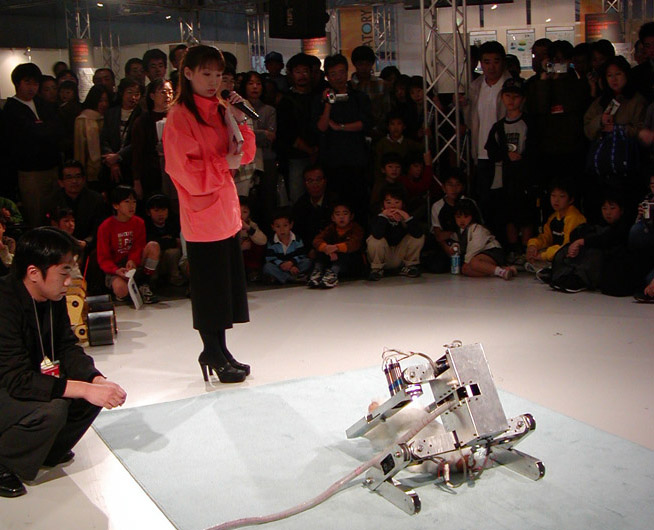
しかし上記の特徴を生かすと,写真のように2本の腕により物体を抱え込むことにより,大型重量物体を扱うことも可能です.
16.5kgのロボットが約5kgの物体を持ち上げることや,力作業を実行することに成功しました.
理論面では,この操作を実行するための自由度と運動成分を持つための機構的条件を明らかにしました.
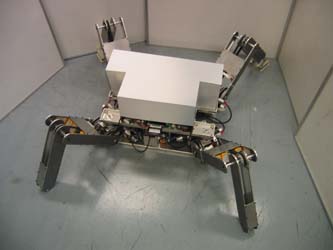
後継機としてQualator IIを開発しました.Qualator IIの特徴は
・電源,バッテリー,計算機等すべて本体に組み込み,自立化を達成したこと.
・脚関節駆動系に平行リンク等価機構を用いて,歩行に適した駆動系としたこと.
です.移動するマニピュレータとして屋外,屋内の作業現場での応用が考えられます.

研究紹介Top