腹腔内組立式ハンド
特許出願:閉空間内で用いる遠隔操作装置 特開2007-307184
ポートから挿入できる棒状の手術器具だけでは,肝臓,脾臓,膵臓等の大型の臓器を扱うことや圧排して空間確保することは難しい.
そこで,タバコ縫合器(前掲)に採用した組立式の考え方を拡張して,
体腔内で大型臓器の把持圧排を可能にする斬新な組立式ハンドを考案しています.
この研究の方向性は二つあり,一つは自由度を増やす方向,もう一つは自由度を少なくして容易な組立やコスト削減を目指す方向です.
この二つの方向性により開発を進めています.
図1は自由度を増やして人の手の様に様々な作業が行える3指9自由度ハンドです.
この組立方法は,対向する二つポートを用いて貫通させるだけであり,
体腔内での機械的な結合がないので容易です.
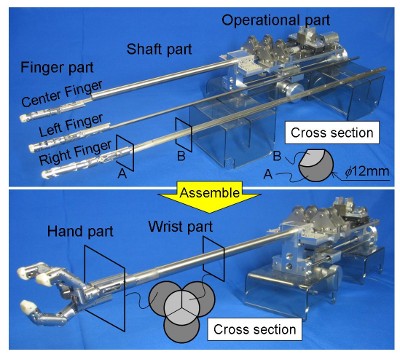
Fig. 1 3指9自由度ハンド
図2は自由度を減らしてより簡単な構造とした3指3自由度ハンドです.
一つのポートだけを用いて組立が可能です.熊手の様な形状をしており,
臓器を押しのけて手術空間を作る作業に機能を特化しています.
指先の柔らかさが調整できる水圧駆動の3指3自由度ハンドも開発しています.
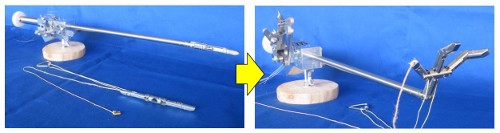
Fig. 2 3指3自由度圧排ハンド
さらに,超音波探触子を搭載した組立式ハンドも開発しています(図3).
これにより臓器内部を観察しながら臓器を操作するという概念を提案しています.
また臓器が超音波を透過する場合,一般に超音波は対向して把持する指まで観察することができます.
これにより対向する指の位置姿勢や把持状態の情報を得ることができます.
ポテンショメータやエンコーダ,触角センサを指に付ける必要がなくなり,この利点は大きいと言えます.
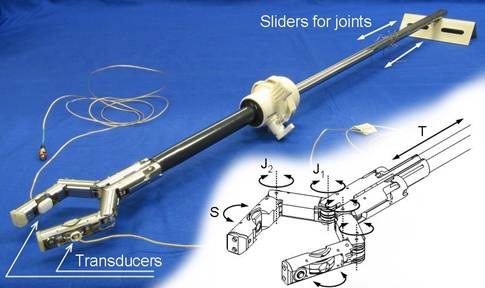
Fig. 3 超音波探触子内蔵ハンド
従来,鉗子を多自由度化して操作性を向上する研究は多数行われてきました.
組立式ハンドは,それらとは異なる発想の新しい手術ロボットに発展する可能性を秘めています.
研究紹介Top