多指ロボットハンドによる器用な物体操作
多くの指と関節を持つ多指ハンドロボットを用いて,器用な物体操作に関する研究を行いました.
物体操作において,指先の把持力を調整することが重要です.
人間の手の場合,把持物体に外乱が加わった場合,瞬時に把持力を調整して滑らないようにしています.
同じことが多指ハンドロボットにもできなくてはすぐに物体を落としてしまいます.
そこでドイツミュンヘン工科大学と協力して高速に把持力を調整することに取り組み,毎4ミリ秒という高速把持力調整を達成しました.
外乱を指先力覚センサを用いて検出し,その変化を考慮して把持力を調整することが可能です.
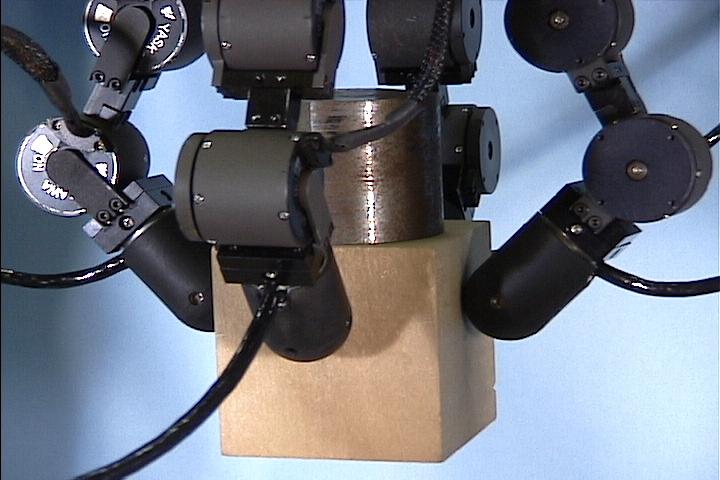
写真のように,把持物体に重量物体を載せても,物体を落とさずに把持しているなどその絶大な効果が確認されました.
これを応用して物体の持ち替え操作を実行させることができました.
持ち替え操作では,指を物体から離すため,把持している指の把持力を随時調整する必要があります.

研究紹介Top