強力な指先力を発生できる省エネルギーロボットハンド
ロボットグリッパは工場内での搬送,組立て作業に多く用いられています.
そこで早さと力強さを両立できる駆動系を備えたロボットハンドを開発しています.
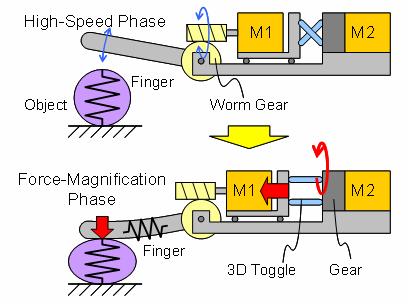
基本原理を図に示します.
一つのモータで早さも力も両立させようとすると大きなモータが必要となり,ハンドが大きく重くなってしまいます.
そこでこの機構は一つの関節を動かすのにギア比の小さい高速低トルクモータ(M1)と,
ギア比の大きい低速高トルクモータ(M2)の二つの小さいモータを用いています.
まずM1でウォームギヤを高速に駆動して指を高速に動作させます.
指が把持対象物に接触したらM1を止め,M2を駆動して立体トグル機構を駆動します.
立体トグル機構はモータM1を後方より強く押し,ウォームスクリューを軸方向に押します.
するとウォームホイールは強い力で回転させられ,指先を把持対象物に押し付けます.
トグル機構を用いて大把持力を出力するため,大把持力出力時のエネルギー消費がゼロです.
電力削減が求められている今日において,工場の省エネルギーに貢献する技術です.
多指ロボットハンド100N Hand
特許出願:把持装置 特開2010-23185
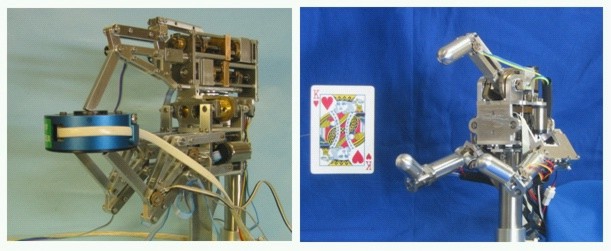
把持力増大機構を搭載して100Nという大把持力が出力できる重量約1kgの3指8自由度ハンドを開発しました.
このハンドの把持力増大機構にもトグル機構を採用しているので,大把持力出力時のエネルギー消費がほぼゼロです.
<動画>100N Hand(5MB) &
100N Hand II(5.6MB)
把持力増大機構を有する5指電動義手
特許出願:把持装置 特開2008-18489
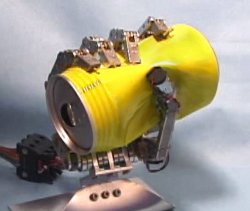
把持力増大機構を組み込んだ重さ328gの5指電動義手を開発しました.
指を高速に開閉するためだけならば,小型のモータで十分です.
それとは別に,一つのモータを追加して,物を握ったら握り込めるような駆動機構を開発しました.
これにより空缶をつぶすほどの把持力を実現することができました.
<動画>空缶つぶし(4.6MB)
大把持力が得られる直動機構
特許出願:開閉両方向に力を出せる把持装置 特許第4581117号
トグル機構を用いた把持力増幅装置ではその構造上片方向(閉じる方向)にしか大きな把持力が出せません.
しかし工場で用いられる平行グリッパは閉じて掴むだけでなく,隙間に爪を差し込んで開く力で把持する必要もあります.
そこで開閉両方向に大きな把持力を出せる平行グリッパを開発しました.
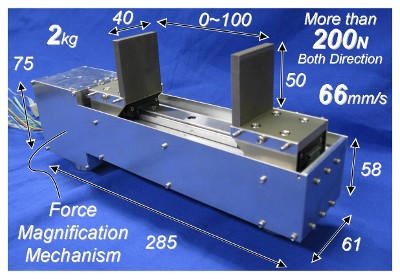
グリッパが軽量であれば,マニピュレータの先端に取り付けたとき,軽量になった分,
大きな質量の把持対象を扱うことや,同じ質量の把持対象であればマニピュレータを高加速で動かすことも可能となります.
研究紹介Top