負荷感応無段変速機(CVT)
特許出願:リンク式無段変速機 特開2005-90562
ロボットハンドの指には,俊敏に動作することと,物体を力強く把持することの二つが要求されます.
スペース的に大型の高出力アクチュエータを使用できないこと,
および減速比において力と速度はトレードオフの関係にあることより,
この二つの要求を共に満たすことは難しいことです.
無段変速機があればこの問題は解決できます.
しかし自動車用無段変速機を小型化してロボットに搭載することは困難です.
ロボットハンド等のロボットの関節は360度回転する必要がありません.
また大きな力を出す方向は一方向だけです.
この事実に着目して5つのリンクとねじりコイルばねから構成される小型・軽量な無段変速機を開発しました.
図に変速の様子を示します.
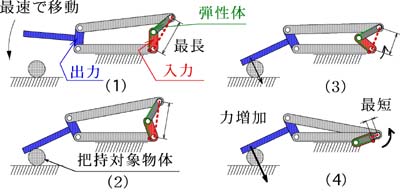
本5リンク機構は入力リンクが2つのリンクとねじりコイルばねで構成されている4リンク機構とみなすことができます.
指先に負荷がかからない時は,入力リンク長がねじりコイルばねによって長く保たれ俊敏に動かすことがでます.
指先に負荷がかかると,入力リンク長が短くなり力強い動きをすることができます.
入力リンク長が変化することによって減速比が変化し無段変速機を実現しています.
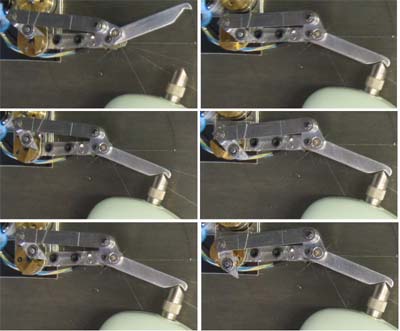
写真のように2kgのペットボトルを持ち上げることができました.

<動画>負荷感応無段変速機を内蔵した指の俊敏かつ力強い動き(12.3MB)
さらに変速機の機構強度を改良し,10kgを持つことができる100gの指関節の開発に成功しました.

<動画>新型負荷感応無段変速機の俊敏かつ力強い動き(17.1MB)
研究紹介Top