Parallel Mechanism Mobile Robots
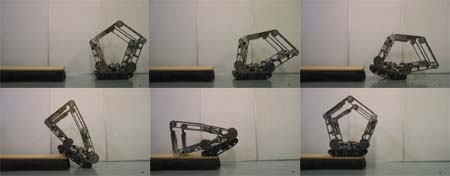
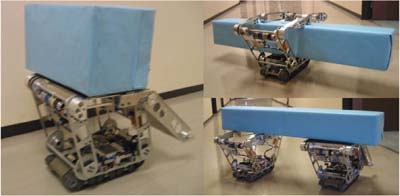
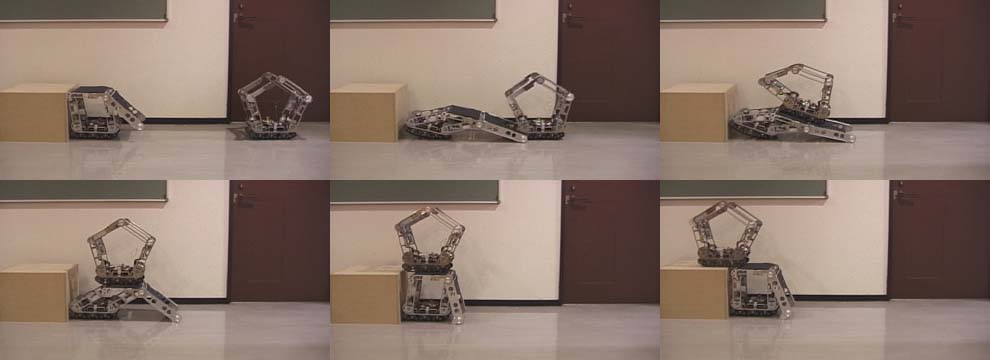
We have proposed a crawler mobile robot whose upper body is a parallel mechanism, 5R closed kinematic chain or 4R closed kinematic chain. The robot has useful functionalities other than just locomotion: Those are getting over a bump and carrying an object by making use of the parallel mechanism. Furthermore, the robot can form three-dimensional structures with other ones and go up to a high level to which the single one cannot.
・getting over a vertical bump
・carrying an object
・going up to a high level
moviedemonstration(20.8MB)
Reserch Top