Whole Quadruped Manipulation
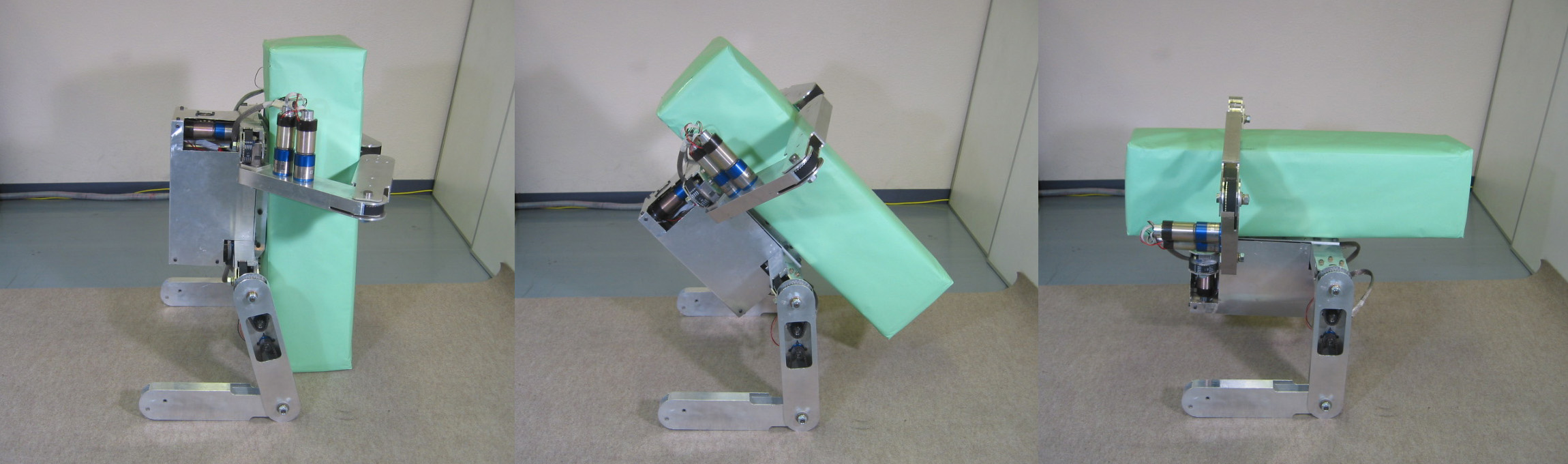
Legged robots are much more useful if they can perform manipulative tasks. We have developed a quadruped robot Quadlator I which has a total of twelve joints. Although its joint arrangement is typical for a quadruped robot, its distinctive features are that it can stand on its knees and its two legs can serve as arms. It can manipulate a relatively large and heavy object and can also perform tasks exerting a force on an external object by using its body and arms.
The two legs standing on their knees support the body. Therefore the motion of the body is constrained. We proposed an appropriate contact mode for their distal links, allowing the body to have a two degree-of-freedom motion suitable for the whole body manipulation even if the floor or ground is not completely even.

Recently we have developed Quadlator II. It features:
(1) It is made self-contained, that is, all batteries, drivers, and computers are in its body.
(2) Its leg employs a parallelogram mechanism, which is suitable for walking.
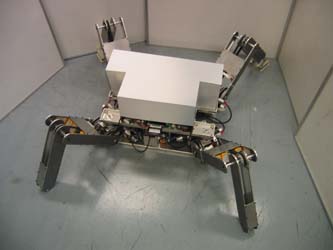

Research Top