Assemblable Hand for Laparoscopic Surgery
o generalize this idea, various shaped instruments can be assembled in the abdominal cavity. Much work has already been done to develop multi-degree-of-freedom forceps. However they are still inadequate to handle or retract large internal organs, such as spleen, pancreas, and liver. So we have proposed assemblable hands for laparoscopic surgery. Figure 1 shows three-fingered nine-degree-of-freedom assemblable hand. We have experimentally verified that the hand can be assembled in a closed box and can grasp large and oily objects like internal organs.
There are two goals for this study. One is to develop a simple hand with a few joints that has a single function such as retracting or grasping, but still more useful than traditional retractors or graspers. The other is to develop a skillful hand aiming at the replacement of surgeons' hands in Hand Assisted Laparoscopic Surgery. In HALS a human hand is inserted into the abdominal cavity through an incision of 7 to 8 cm, which is invasive. The assemblable hand requires only small incisions.
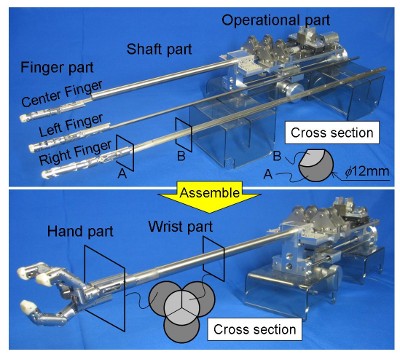
Fig. 1 Three-fingered nine-degree-of-freedom assemblable hand
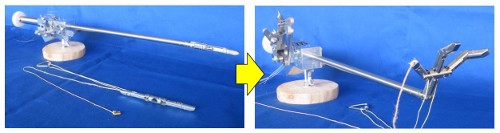
Fig. 2 Three-fingered three-degree-of-freedom assemblable hand as a retractor
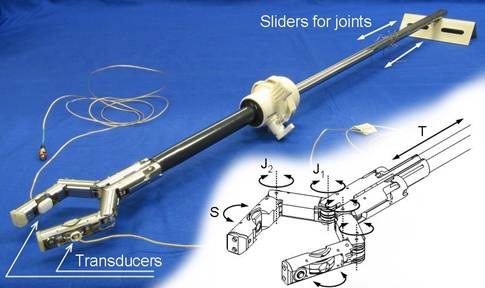
Fig. 3 Assemblable Hand with ultra sonic tactile sensors
Research Top