Dextrous Manipulation with a Multifingered Hand
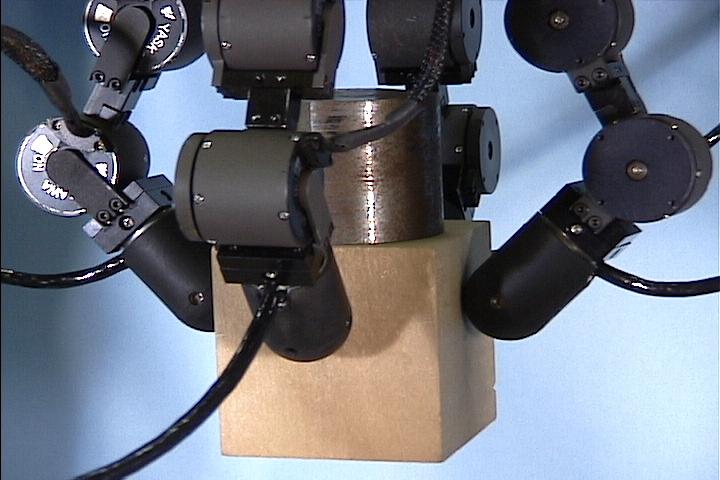
We studied dextrous manipulation with a four fingered hand. A human can adjust his/her fingertip forces instantly when an external disturbance is applied to a grasped object. A robot hand must be able to do this not to drop a grasped object. We installed the grasp force optimization algorithm developed in Technical University Munich. The four fingered hand in the figure can adjust its fingertip forces very fast, every 4m second. It can grasp an object firmly and can regrasp an object.

Another problem to be solved is to plan motions of fingers to achieve desired regrasping of an object. This planning problem would be difficult to solve if it were formulated in "Configuration Space" because of its high dimensionality. Our approach is to use primitive motions of regrasping which can be identified in the motions of fingers of human hands. A sequence of the primitives to achieve desired regrasping can be easily planned.
Power grasps can grasp an object more firmly than fingertip grasps by using the whole of a hand. The grasp force of a power grasp is in general indeterminate if friction is assumed in contact points. No further analyses had been made on this point. We analyzed the kinematics of power grasps with Prof. Joel W. Burdick, California Institute of Technology, and showed an efficient algorithm to compute the bounded region of the indeterminate grasp force.
Research Top