Load-Sensitive Continuously Variable Transmission for Robot Hands
Fingers of a robot hand require speed when opening and closing and power when grasping an object. However, it is difficult to improve the speed and power performances simultaneously if the reduction ratio of a finger joint drive is constant. A continuously variable transmission (CVT) is a solution to this problem because low reduction ratios enable quick motions and high reduction ratios enable large force or torque. The outputs of most existing CVTs are rotational motions of 360 degrees, such as V-belt CVT and toroidal CVT. This is mainly because they were invented for automobiles. However, robot joints do not necessarily rotate 360 degrees. Focusing on this fact, we have developed a remarkably simple load-sensitive CVT consisting of a five-bar linkage and a torsion coil spring.
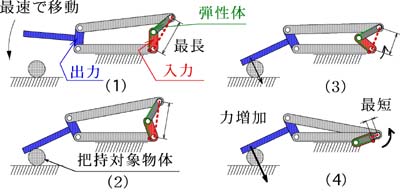
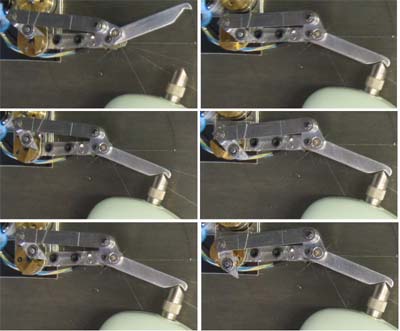
The figure below illustrates the process of continuously varying transmission. When the fingertip approaches the object, no external load is applied to the fingertip. The length of the virtual input link Lvir maintains its maximum by the torsion coil spring in (a). Therefore, the finger can move fastest with the lowest reduction ratio.
After the fingertip makes contact with the object, the input torque needs to be increased to increase the fingertip force. The length of the virtual input link Lvir becomes shorter and the reduction ratio R becomes higher ((b)-(d)) as the input torque is increased.
The developed finger can lift up a load of 2kg.

movieHigh speed and high force motion using load-sensitive continuously variable transmission(12.3MB)
We have succeeded in developing a 100g finger joint that can exert a 100N fingertip force by considering the mechanical strength of its parts.

movieHigh speed and high force motion using new load-sensitive continuously variable transmission(17.1MB)
Research Top